Hayabusa2

| Mission type | Asteroid sample return |
|---|---|
| Operator | JAXA |
| COSPAR ID | 2014-076A |
| SATCAT no. | 40319 |
| Website | global |
| Spacecraft properties | |
| Manufacturer | NEC[1] |
| Launch mass | 609 kg (1,343 lb) |
| Dimensions | 1 × 1.6 × 1.25 m (3.3 × 5.2 × 4.1 ft) (spacecraft core), 6 m × 4.23 m (19.7 ft × 13.9 ft) (solar panel) |
| Power | 2.6 kW (at 1 au), 1.4 kW (at 1.4 au) |
| Start of mission | |
| Launch date | 3 December 2014, 04:22 UTC[2] |
| Rocket | H-IIA 202 |
| Launch site | LA-Y, Tanegashima Space Center |
| End of mission | |
| Landing date | December 2020 (planned) |
| Landing site | Woomera, Australia |
| Flyby of Earth | |
| Closest approach | 3 December 2015 |
| Distance | 3,090 km (1,920 mi)[3] |
| (162173) Ryugu orbiter | |
| Orbital insertion | June 27, 2018, 09:35 UTC[4] |
| Orbital departure | December 2019 (planned) |

 |
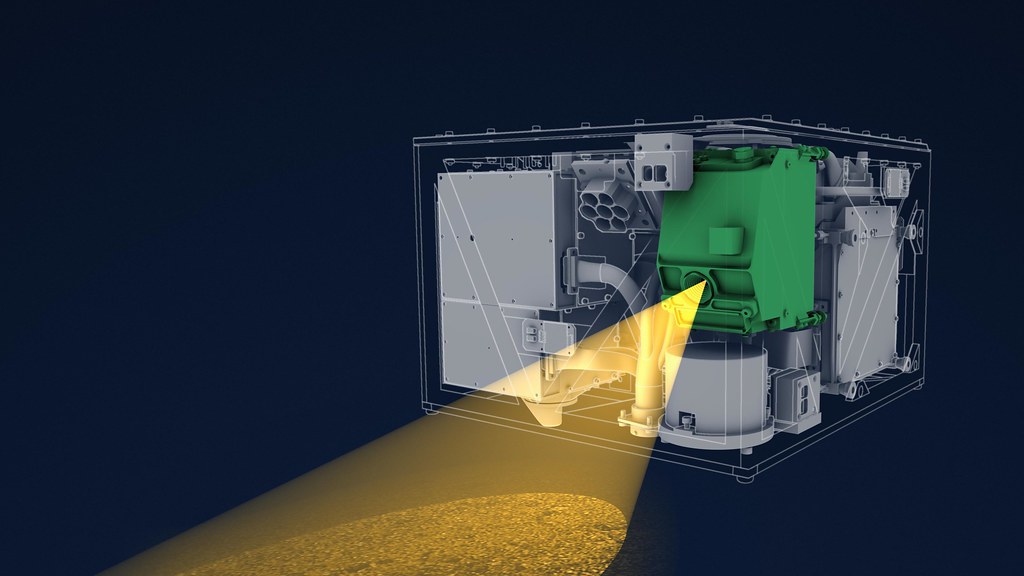
| The location of Hayabusa2 thrusters A set of 12 thrusters is loaded with the Hayabusa2 spacecraft as circled in red. Propulsion at 2.9 cm/s in the plus z-axis proceeded for the rendezvous. |
| Launch of Hayabusa2 spacecraft | 3 December 2014 |
| Health check of the MASCOT lander | June 2015 |
| Calibration of MASCOT instruments | September 2015 |
| Earth fly-by | December 2015 |
| Health check of the MASCOT lander | July 2016 |
| Calibration of MASCOT instruments | November 2016 |
| Health check of the MASCOT lander | May 2017 |
| Calibration of MASCOT instruments | November 2017 |
| Health check of the MASCOT lander | Spring 2018 |
| Hayabusa2 arrives at asteroid | 27 June 2018 18-month long stay |
| MASCOT lands on asteroid Ryugu | 3 October 2018 |
| Hayabusa2 collects samples of the asteroid during a short ground contact (possibly several times) | 2019 |
| Hayabusa2 to depart from asteroid | November/December 2019 |
| Hayabusa2 to arrive at Earth | Late 2020 |
| Type of mission | Asteroid sample return mission |
| Operator | JAXA |
| Launch date | 3 December 2014, 04:22 UTC |
| Launch site | Yoshinobu Launch Complex, Tanegashima Space Center |
| Rocket | H-IIA 202 (Flugnummer F26) |
| Mission length | 6 years, return planned for December 2020 |
| Mission control centre | JAXA SSOC (Sagamihara Space Operations Center) |
| MASCOT control centre |
DLR Microgravity User Support Center (MUSC)
|
| Launch mass | approx. 600 kilograms |
| Key features | |
| Electric Propulsion System (Ion engine) | Used for changing orbit during journey to asteroid as well as return to Earth; engine is energy-efficient, with one tenth of power consumption compared to chemical propellant |
| Sampler mechanism |
SMP to collect samples from surface of asteroid. Cylinder-shaped sampler horn will be lowered to surface, shooting out a small projectile once it makes contact with the surface. Materials ejected will then be collected via a catcher
|
| Target markers | Five beanbag-type markers will descend to the asteroid's surface to serve as artificial landmarks prior to landing for the distance measurement of teh collision warning syst. The target markers are hollow and filled with a granulate that dampens the kinetic energy and thus prevents them from bouncing from the surface. |
| Re-entry capsule | Container that stores samples from asteroid and will re-enter Earth’s atmosphere at 12 kilometres per second. |
| Mission instruments | |
| Small Carry-on Impactor (SCI) | Two-kilogram copper lump to collide with surface of asteroid to make an artificial crater, used to study the inside structure of the asteroid before and after impact; will also be used to sample 'fresh' material underground |
| Near InfraRed Spectrometer (NIRS3) and Thermal Infrared Imager (TIR) |
Remote sensing instruments to measure asteroid from Hayabusa2’s 20 kilometre-distance position. NIRS3 will investigate mineral and water metamorphism; TIR to study temperature and thermal inertia of asteroid
|
| MINERVA-II |
2 small rovers that will study the asteroid from its surface.
|
| MASCOT |
Small lander that will study the asteroid using four observation devices and that will hop to three locations on the asteroid
|
| Origin | C-class asteroid (carbon-rich), near-Earth asteroid of the Apollo group |
| Discovery | May 1999 |
| Discoverer | LINEAR (Lincoln Near Earth Asteroid Research) Team |
| Shape | Approximately spherical with the irregularities expected in small bodies (determined by thermal observations. |
| Diameter | 880 ± 15 metres |
| Rotation period | 7.6 hours |
| Albedo | 0.05 (very low, darker than coal) |





 |
| MASCOT operation |


 |
| Rover-1A and Rover-1B are now named “Hibou” (horned own) and “Owl” |
MASCOT separation in 56 m.
Ryugu g=0.11 - 0.15 mm/s2
t=sqrt(2*h/g) =sqrt(2*56/0.00013)=928.191 s = 15.5 min
v= g . t = 0.00013 . 928.191 = 0.1207 m/s
MASCOT will fall from a height of 56 meters 15.5 minutes
The lander successfully separated from the Japanese Hayabusa2 space probe at 03:58 CEST.
MASCOT came to rest on the surface approximately 20 minutes after the separation.
Already during the descent on the asteroid, the camera switched MASCAM on and took 20 pictures, which are now stored on board the Japanese space probe.
Dimensions
|
295 mm x 275 mm x 195 mm
|
Weight
|
9.6 kilograms
|
Target asteroid
|
162173 Ryugu
|
Mother craft
|
Hayabusa2
|
Operators
|
DLR, CNES, JAXA
|
Instruments
| |
MASCOT Camera (MASCAM)
|
Wide-angle camera that takes pictures during the descent to the asteroid surface and will provide ground data for the instruments on board Hayabusa2 as well as contextual information for the instruments on board MASCOT. (Institute of Planetary Research, DLR)
|
MASCOT Radiometer (MARA)
|
The radiometer is used for the high-resolution determination of the surface temperature as well as the thermal changes during the day-night changes on the asteroid. (Institute of Planetary Research, DLR)
|
Magnetometer (MAG)
|
Determination of the asteroid's magnetic field (Institute of Geophysics and Extraterrestrial Physics, TU Braunschweig)
|
Infrared spectrometer (MicrOmega)
|
Determination of the mineralogical composition of the asteroid surface. (Institut d'Astrophysique Spatiale, Université Paris Sud)
|


The drive unit can
apply 3 Nm output torque at a cylindrical size of 31 mm diameter with 64 mm length
and a weight of 166 g. The PCB power output is 12 V and 4 A nominal.





Hayabusa2 Remote Sensing Instruments:
At the end of the science phase in December 2019,[11] Hayabusa2 will use its ion engines for changing orbit and return to Earth.[39] In December 2020,[11] the re-entry capsule with three separate containers that carry the asteroid samples will be released to re-enter Earth's atmosphere at 12 km/second,[39] while the spacecraft drifts past Earth. The spacecraft's sample capsule will parachute down and land in the Australian desert.[40]
When the spacecraft returns to Earth and delivers the sample capsule in December 2020, it is expected to retain 30 kg of xenon propellant, which can be used to extend its service and flyby new targets to explore.[47] One prime candidate is asteroid 2001 WR1 for a flyby on 27 June 2023.[47]
| Rok | Mesiac, deň | Udalosť | Stav |
|---|---|---|---|
| 2018 | January 10 | Third stage of ion engine operation begins.
(Hayabusa2 will use its ion engine to make adjustments to its course)
| Complete |
| June 3 | Ion engine operation ends. | Complete | |
| June 3 | Start of asteroid approach. (distance: 3,100 km) | Complete | |
| June 27 | Arrival at asteroid Ryugu (altitude 20 km). | Complete | |
| July 17 - 25 | BOX-C operation (July 20, Altitude 6km). | Complete | |
| July 31 - August 2 | Medium altitude observations of Ryugu #1 (Aug. 1, altitude 5 km). | Complete | |
| August 5 - 10 | Operation to measure gravity of Ryugu (altitude 851 m). | Complete | |
| August 18 - September 7 | BOX-B operation (tour observation at altitude 20km) | Complete | |
| September 10 - 12 | Rehearsal 1 for Touchdown 1 (TD1-R1) (Sep. 12, altitude ~600m) | Complete | |
| September 19 - 21 | MINERVA-II-1 Deployment operation(Sep. 21, altitude ~55m) | Complete | |
| October 2 -4 | MASCOT operation | Complete | |
| Mid. of October | Rehearsal 2 for Touchdown 1 | Complete | |
| January | Touchdown 1
(First landing to gather a sample.)
| Planning | |
| November - December | Operation during solar conjunction
(Communications are disabled during this period, as the Sun is between the Earth and Hayabusa2.)
| Planning | |
| 2019 | January | Medium altitude observations of Ryugu #2 (altitude 5 km). | Planning |
| February | Period for touchdown operation #2 | Planning | |
| March - April | Crater generation operation
(Hayabusa2 will drop the explosive small carry-on impactor (SCI) to generate a crater in order to gather subsurface material)
| Planning | |
| April - May | Period for touchdown operation #3 | Planning | |
| July | Period for rover deployment #2
(Remaining MINERVA-II rovers will be released onto the asteroid surface)
| Planning | |
| August - November | Hayabusa2 remains near the asteroid | Planning | |
| November - December | Departure from asteroid | Planning |



| Time (CEST) | Event |
|---|---|
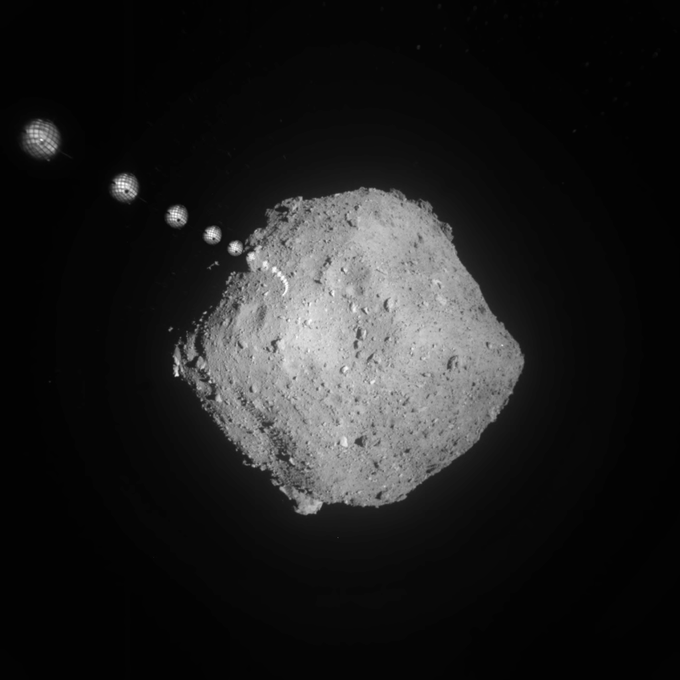
| 03:57:21 | At an altitude of 51 metres above asteroid Ryugu, MASCOT is pushed out of the Hayabusa2 supporting frame by means of a spring mechanism behind a push-off plate at about 4 centimetres per second and starts to descend to Ryugu without control of its ground station. |
| 04:03 | Approximately six minutes later, MASCOT touches down on Ryugu, making contact with a block of rocks about three to four metres high. The Optical Navigation Camera (ONC) from Hayabusa2 records the process in high-resolution images. At the same time, DLR’s MASCAM acquires 20 images of the asteroid during the descent. MASCOT lands on the designated landing site MA-9 (Alice's Wonderland). It is located at about 300 degrees east and 30 degrees south. |
| Around 04:34 First location | After another approximately. 31 minutes and several contacts with the surface, MASCOT reaches its first resting position. It is asteroid day at the landing site and the surface measurements start. |
| Around 06:30 | At the DLR Control Centre in Cologne it is recognised that MASCOT is lying on an unfavourable side and thus cannot carry out its planned experiments. All systems and experiments are operating as intended. |
| Around 09:20 | An unscheduled command from the Earth is sent to Hayabusa2 and from there to MASCOT to activate the swing arm to turn the lander into its intended position for the experiments. The command time to Ryugu, which is about 300 million kilometres away, is about 18 minutes one way. |
| Around 09:52 | MASCOT has completed its first day-and-night cycle. The second day on Ryugu begins. |
| Around. 10:30 Second location | The manoeuvre has brought the desired result. MASCOT is in the right position, is now operational and automatically starts to perform its four experiments again. |
| Around 12:51 | The second daylight phase on Ryugu is slowly coming to an end, and MASCOT turns with Ryugu into its second asteroid night. |
| Around 17:28 | MASCOT’s third day on Ryugu begins. |
| Around 18:29 Third location | MASCOT successfully executes a mini-move. This manoeuvre was commanded by the operations team in Cologne to optimise the position of the sensors of the experiments. Further scientific investigations are carried out. |
| Around 20:04 Fourth location | The last jump is commanded to MASCOT and the lander goes into the End of Life phase. Further scientific investigations are carried out. |
| 21:04 | It is the end of the third day for MASCOT on Ryugu. In the meantime, more than 16 hours have passed – the lander’s expected maximum battery life. Contrary to the calculations, the battery still provides some power before the contact with MASCOT breaks off by the entry of a radio shadow and the upcoming night. Instead of 16 hours, the experiments were able to work for 17 hours and 7 minutes. |



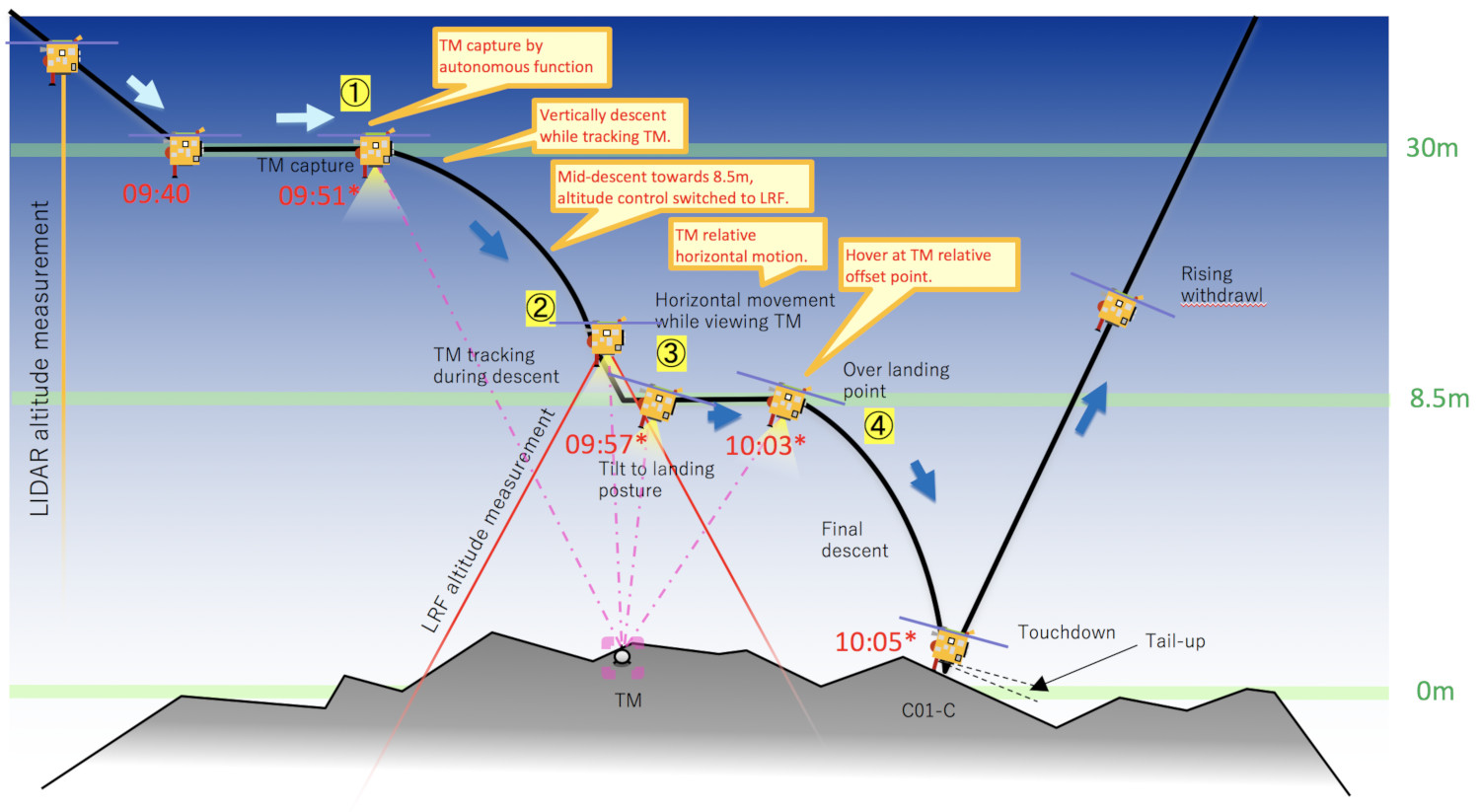
The touchdown 1
The touchdown 2
 |
| The 2nd touchdown |
http://www.hayabusa2.jaxa.jp/en/topics/20190711e_PPTD_ImageBulletin/
http://www.hayabusa2.jaxa.jp/en/topics/20190726e_TD2_images/
http://www.hayabusa2.jaxa.jp/en/enjoy/material/press/Hayabusa2_Press20190822_ver12_en.pdf
2nd target marker
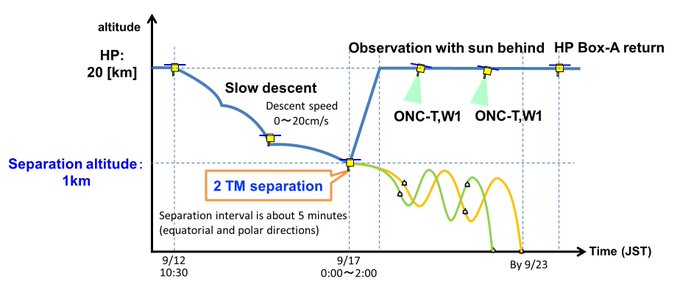
The separation image of the 2nd target marker, TM-C! Separation time: 2019/9/17 at 01:24 JST Altitude: 1km This is an overlay of images taken every 4s (for ~1min) while the spacecraft ascends at 11cm/s. TM descent speed is still almost zero. (JAXA, Chiba Inst. Tech & collab)
MINERVA-II2 (Rover2) separation operation
 |
| MINERVA-II2 (Rover2) separation operation |
This is MINERVA-II2 captured by the wide-angle optical navigation camera (ONC-W2) immediately after separation. Radio-waves are also being received from MINERVA-II2. (Credit: JAXA
http://www.hayabusa2.jaxa.jp/en/enjoy/material/press/Hayabusa2_Press20190924_ver4_en2.pdf


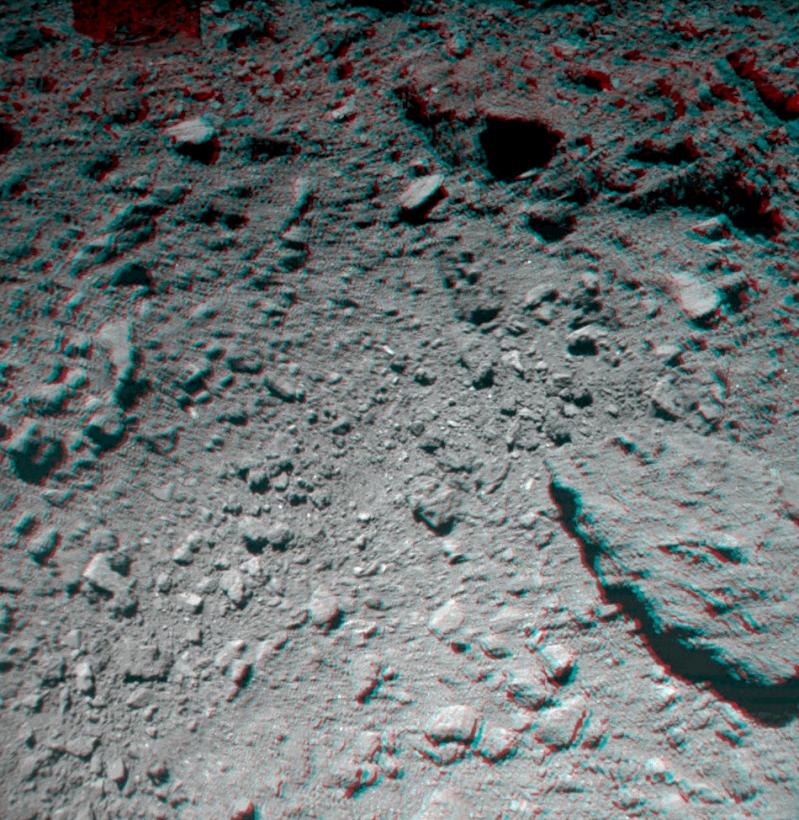
Ryugu

https://www.flickr.com/photos/dlr_de/sets/72157693770479701
https://www.dlr.de/dlr/desktopdefault.aspx/tabid-10975/
https://www.dlr.de/dlr/en/desktopdefault.aspx/tabid-10081/151_read-30235/#/gallery/32338
http://www.hayabusa2.jaxa.jp/en/enjoy/material/factsheet/FactSheet_en_v2.31s.pdf
https://directory.eoportal.org/web/eoportal/satellite-missions/h/hayabusa-2
http://www.hayabusa2.jaxa.jp/en





Komentáre
Zverejnenie komentára